Il y a une nouvelle forme de vie artificielle sur notre planète
Ces minuscules robots se déplacent à l’aide de petites projections ressemblant à des cheveux.
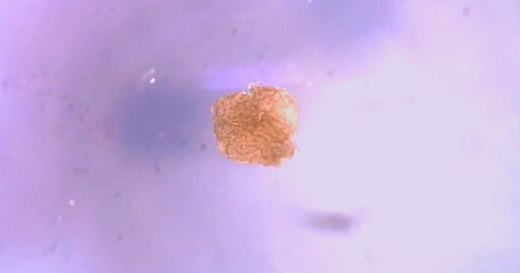
Tufts University / YouTube
L’année dernière, des scientifiques ont créé les premières machines vivantes en associant des cellules de grenouilles africaines à de minuscules robots.
L’un d’eux utilisait des cellules cardiaques sculptées pour se propulser, pousser des charges utiles et même travailler collectivement au sein d’un essaim d’autres « Xenobots ».
Et aujourd’hui, la même équipe de recherche a annoncé la création de formes de vie capables de s’auto-assembler en un corps à partir d’une seule cellule, selon une nouvelle étude publiée dans la revue Science Robotics.
Les Xenobots peuvent également se déplacer plus rapidement, naviguer dans des environnements variés et vivre plus longtemps que les premiers modèles, tout en travaillant en groupe et en se soignant lorsqu’ils sont endommagés.
Un nouveau modèle de « Xenobot » construit selon une méthode d’ingénierie « ascendante »
Par rapport au modèle précédent de Xenobots (ou, numéro 1.0) – où les automates de la taille d’un millimètre étaient fabriqués dans un style « descendant » via le placement manuel de tissus, le façonnage chirurgical de la peau de grenouille et l’inclusion de cellules cardiaques pour créer le mouvement. Mais le nouveau modèle de Xenobots utilise une méthode d’ingénierie « ascendante ».
Les biologistes de l’université Tufts ont utilisé des cellules souches provenant d’embryons de la grenouille africaine Xenopus laevis – qui a inspiré le nom Xenobots – permettant aux minuscules robots de s’auto-assembler et de se développer en sphéroïdes où certaines cellules se sont transformées pour produire des cils (ou de minuscules projections ressemblant à des cheveux) qui oscillent dans un sens ou dans l’autre, ou tournent d’une manière spécifique.
Au lieu de s’appuyer sur des cellules cardiaques modelées manuellement – qui utilisent des contractions rythmiques naturelles pour se déplacer dans une zone – les cils donnent aux nouveaux robots sphéroïdaux des « jambes » capables de les déplacer rapidement sur une surface. Chez les grenouilles (ou même chez les humains), les cils se trouvent généralement sur les surfaces muqueuses, comme les poumons, pour faciliter l’élimination des agents pathogènes ou de divers corps étrangers.
Cependant, pour les Xénobots, les petits poils permettent une locomotion rapide.
« Nous sommes témoins de la remarquable plasticité des collectifs cellulaires, qui construisent un nouveau « corps » rudimentaire tout à fait distinct du corps par défaut – dans ce cas, une grenouille – malgré un génome tout à fait normal », a déclaré le professeur distingué de biologie Michael Levin, qui est également directeur du Allen Discovery Center de l’université Tufts et auteur correspondant de la nouvelle étude, selon un communiqué sous embargo partagé avec IE. « Dans un embryon de grenouille, les cellules coopèrent pour créer un têtard. Ici, en dehors de ce contexte, nous voyons que les cellules peuvent réaffecter leur matériel génétiquement codé, comme les cils, à de nouvelles fonctions telles que la locomotion. »
Xénobots soumis à des centaines de milliers de scénarios environnementaux
« Il est étonnant que les cellules puissent spontanément assumer de nouveaux rôles et créer de nouveaux plans corporels et comportements sans que de longues périodes de sélection évolutive n’aient été nécessaires pour ces caractéristiques », a ajouté Levin.
Les xénobots sont construits comme des robots traditionnels, a expliqué le scientifique principal Doug Blackiston, coauteur principal de l’étude avec la technicienne de recherche Emma Lederer. La différence avec les nouveaux robots est l’utilisation de cellules et de tissus au lieu d’éléments artificiels pour construire la forme et fournir des comportements prévisibles.
Les scientifiques de Tufts ont créé les organismes physiques, mais les scientifiques de l’UVM se sont occupés d’exécuter des simulations informatiques capables de modéliser les différentes formes des Xenobots – pour voir s’ils présentaient des comportements différents, en groupe ou séparément. L’équipe a utilisé le groupe de superordinateurs Deep Green du Vermont Advanced Computing Core de l’UVM pour soumettre les robots à des centaines de milliers de scénarios environnementaux aléatoires, créés par un algorithme évolutionnaire.
Les simulations ont permis de déterminer quels Xenobots étaient les plus aptes à mettre en commun leurs ressources en essaims et à rassembler de gros tas de débris dans un champ de particules. « Nous connaissons la tâche, mais il n’est pas du tout évident – pour les gens – de savoir à quoi doit ressembler une conception réussie », a déclaré Josh Bongard, un expert en robotique. « C’est là que le superordinateur intervient et cherche dans l’espace de tous les essaims de Xenobots possibles pour trouver l’essaim qui fait le mieux le travail. »
« Nous voulons que les Xenobots fassent un travail utile », a ajouté M. Bongard. « Pour l’instant, nous leur confions des tâches simples, mais à terme, nous visons un nouveau type d’outil vivant qui pourrait, par exemple, nettoyer les microplastiques dans l’océan ou les contaminants dans le sol. » Le potentiel des robots de cette taille et dotés de ces capacités est vaste – d’autant que les nouveaux Xenobots peuvent enregistrer des informations en changeant de couleur, comme la mémoire. Mais ces petites bestioles et leurs successeurs pourraient un jour permettre de comprendre comment les organismes multicellulaires sont apparus à partir d’organismes unicellulaires, façonnant le traitement de l’information, la prise de décision et la cognition dans des organismes plus complexes.
Cet article a été mis à jour régulièrement à mesure que de nouvelles informations étaient disponibles.
Lire aussi : Des scientifiques viennent de créer une forme de vie artificielle quantique pour la toute première fois
Source : Interesting Engineering – Traduit par Anguille sous roche