Un nouveau bout de doigt imprimé en 3D ressent et agit comme la peau humaine
Les chercheurs se sont inspirés de la peau réelle.
Depuis plusieurs années, les chercheurs travaillent sur la dextérité des robots en essayant de leur donner une sensibilité semblable à celle des humains. Cela n’a pas été une tâche facile, car même les machines les plus avancées ont du mal à maîtriser ce concept.
Aujourd’hui, le professeur de robotique et d’intelligence artificielle Nathan Lepora, du département de mathématiques de l’université de Bristol, basé au Bristol Robotics Laboratory, pourrait avoir fait une percée importante dans ce domaine, selon un communiqué publié mercredi par l’institution.
Un développement passionnant dans le domaine de la robotique douce
« Notre travail permet de découvrir comment la structure interne complexe de la peau humaine crée notre sens du toucher humain. Il s’agit d’un développement passionnant dans le domaine de la robotique douce – la possibilité d’imprimer en 3D une peau tactile pourrait permettre de créer des robots plus adroits ou d’améliorer de manière significative les performances des mains prothétiques en leur donnant un sens du toucher intégré », a déclaré le professeur Lepora.
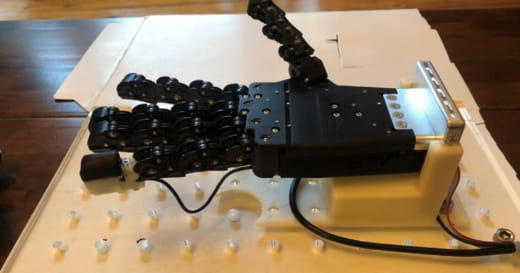
Comment cette ambitieuse équipe de chercheurs a-t-elle réussi à créer un sens du toucher semblable à celui des humains ? Eh bien, ils se sont inspirés de la peau réelle. Ils ont utilisé un maillage imprimé en 3D de papilles en forme d’épingle sur la face inférieure de la peau compliante, imitant les papilles dermiques que l’on trouve entre les couches épidermiques externes et dermiques internes de la peau humaine réelle. Ils ont ensuite utilisé des imprimantes 3D avancées capables de combiner des matériaux souples et durs pour créer le type de structures que l’on ne trouvait jusqu’à présent que dans les actifs biologiques.
Des signaux nerveux artificiels aussi bons que les vrais
« Nous avons constaté que notre bout de doigt tactile imprimé en 3D peut produire des signaux nerveux artificiels qui ressemblent aux enregistrements de vrais neurones tactiles. Les nerfs tactiles humains transmettent des signaux provenant de diverses terminaisons nerveuses appelées mécanorécepteurs, qui peuvent signaler la pression et la forme d’un contact. Les travaux classiques de Phillips et Johnson en 1981 ont permis de tracer les enregistrements électriques de ces nerfs pour étudier la ‘résolution spatiale tactile’ à l’aide d’un ensemble de formes standard striées utilisées par les psychologues. Dans notre travail, nous avons testé le bout de notre doigt artificiel imprimé en 3D en lui faisant ressentir ces mêmes formes striées et nous avons découvert une correspondance étonnamment proche des données neurales », a ajouté le professeur Lepora.
L’équipe s’efforce maintenant de rendre le bout du doigt artificiel aussi sensible aux détails fins que le doigt réel. Actuellement, la peau imprimée en 3D est plus épaisse que la peau réelle, ce qui peut entraver ce processus. C’est pourquoi l’équipe de Lepora travaille maintenant à l’impression 3D de structures à l’échelle microscopique de la peau humaine.
« Notre objectif est de fabriquer une peau artificielle aussi bonne – voire meilleure – que la peau réelle », conclut le professeur Lepora. Le résultat final pourrait avoir de nombreuses applications en robotique douce, y compris dans le Metaverse.
Lire aussi : Cette main robotique est assez précise pour déplacer une puce électronique avec une pince à épiler
Source : Interesting Enigneering – Traduit par Anguille sous roche