
Le MIT lance son bateau entièrement autonome dans les canaux d’Amsterdam
Le Roboat II a fait le tour des canaux de la ville pendant trois heures, sans aucune assistance.
Cinq ans après sa création, le navire flottant autonome du MIT a vu sa taille s’améliorer et on lui a enseigné de nouvelles méthodes de navigation autonome.
Le Roboat II s’est déplacé sur les canaux d’Amsterdam pendant trois heures, apprenant à cartographier et à tracer les célèbres voies navigables néerlandaises avant d’accoster avec une petite erreur de 17 cm seulement.
Les chercheurs du laboratoire d’informatique et d’intelligence artificielle du MIT (CSAIL) sont à l’origine de ce projet, ainsi que l’Institut d’Amsterdam pour les solutions métropolitaines avancées.
Le navire utilisé par l’équipe d’Amsterdam n’a pas la taille finale du Roboat II, avec ses 2 mètres, le bateau d’essai fait environ la moitié de sa taille prévue.
Roboat II
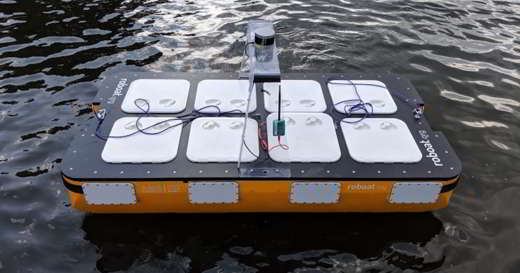
Cette deuxième version de Roboat pèse environ 50 kg et se déplace en douceur grâce à ses quatre hélices, au LiDAR, au GPS et à d’autres capteurs. Il peut se déplacer dans n’importe quelle direction et a la capacité de transporter deux personnes ainsi que le poids équivalent en cargaison.
Grâce à son algorithme de localisation et de cartographie simultanées (SLAM), le navire autonome peut se voir confier des tâches spécifiques telles que le ramassage de personnes. Une fois que le système connaît sa tâche, il trace automatiquement sa route en fonction des conditions météorologiques et du trafic.
Étant donné l’importance accordée aux véhicules terrestres autonomes et aux drones, il est bon de voir que l’on accorde plus d’attention aux mouvements autonomes sur l’eau.

Roboat II dans l’eau. Source : MIT
« Le développement d’un système de bateau autonome capable d’une cartographie précise, d’un contrôle robuste et d’un transport humain est une étape cruciale pour que le système soit mis en œuvre dans le Roboat grandeur nature. Nous espérons également qu’il sera finalement mis en œuvre dans d’autres bateaux afin de les rendre autonomes », a déclaré Wei Wang, un associé postdoctoral senior du Senseable City Lab et du CSAIL, et auteur de l’étude.
Le système modulaire peut être organisé de manière à ce que plusieurs bateaux se coordonnent entre eux, un seul bateau « leader » prenant en charge le projet. Cela signifie qu’un ensemble plus important de marchandises peut être transporté en même temps, les bateaux « suiveurs » se déplaçant le long du bateau « leader » grâce à une technique appelée « système de contrôle distribué ».
L’équipe a maintenant en tête de créer une version autonome plus grande du bateau, qui peut transporter entre quatre et six passagers, et qui mesurera quatre mètres de long. L’équipe va également se concentrer sur l’amélioration de la détection et de l’identification des objets en temps réel, afin de pouvoir gérer des situations plus complexes susceptibles de se produire dans le système de canaux d’une ville.
Lire aussi : Impressionnant : Tesla déploie la conduite entièrement autonome en bêta
Source : Interesting Engineering – Traduit par Anguille sous roche














