
L’informatique hyperdimensionnelle découverte pour aider l’IA à créer des souvenirs
La nouvelle théorie informatique permet aux intelligences artificielles de stocker des souvenirs.
- Pour devenir autonomes, les robots ont besoin de percevoir le monde qui les entoure et de bouger en même temps.
- Les chercheurs créent une théorie du calcul hyperdimensionnel pour aider à stocker les mouvements du robot dans des vecteurs de haute dimension.
- Cette amélioration de la perception permettra aux intelligences artificielles de créer des souvenirs.
Les androïdes rêvent-ils de moutons électriques ? Philip K. Dick s’en est posé la célèbre question dans ses histoires qui exploraient ce que signifiait être humain et robot à l’ère de l’intelligence artificielle avancée et répandue. Nous ne sommes pas encore tout à fait dans la réalité de « Blade Runner », mais maintenant une équipe de chercheurs a trouvé une nouvelle façon pour que les robots se souviennent, et ça pourrait combler l’écart entre les robots et nous pour de bon.
Pour que les robots soient aussi compétents que les humains dans diverses tâches, ils doivent coordonner les données sensorielles avec les capacités motrices. Des scientifiques de l’Université du Maryland ont publié un article dans la revue Science Robotics décrivant une approche potentiellement révolutionnaire pour améliorer la façon dont l’intelligence artificielle gère la représentation sensorimotrice en utilisant la théorie du calcul hyperdimensionnel.
Ce que les chercheurs ont cherché à créer, c’est une façon d’améliorer la « perception active » d’un robot – sa capacité d’intégrer comment il perçoit le monde qui l’entoure et comment il se déplace dans ce monde. Comme ils l’écrivent dans leur article, « nous constatons que l’action et la perception sont souvent maintenues dans des espaces séparés », qu’ils attribuent à la pensée traditionnelle.
Ils ont plutôt proposé « une méthode pour coder les actions et les perceptions ensemble dans un espace unique qui est significatif, sémantiquement informé et cohérent en utilisant des vecteurs binaires hyperdimensionnels (hyperdimensional binary vectors, HBVs)« .
Comme l’explique leur communiqué de presse, les HBVs travaillent dans des espaces de très grande dimension, contenant une pléthore d’informations sur différents éléments distincts comme une image, un son ou une commande. Celles-ci peuvent être regroupées en séquences d’éléments distincts et en groupes d’éléments et de séquences.
En utilisant ces vecteurs, les chercheurs cherchent à conserver toutes les informations sensorielles que le robot reçoit en un seul endroit, créant essentiellement ses souvenirs. Au fur et à mesure que plus d’informations sont stockées, des vecteurs « historiques » sont créés, ce qui augmente le contenu de la mémoire du robot.
Les scientifiques pensent qu’une perception et une mémoire actives permettraient aux robots de prendre des décisions plus autonomes, d’anticiper les situations futures et d’accomplir les tâches.
Le « pipeline » hyperdimensionnel

Ce « pipeline » décrit comment les données d’un vol de drone sont enregistrées et traduites en vecteurs binaires qui sont intégrés en mémoire par des opérations vectorielles. Cette mémoire peut alors être rappelée.
« Un percepteur actif sait pourquoi il souhaite ressentir, puis choisit ce qu’il doit percevoir et détermine comment, quand et où atteindre la perception », a dit Aloimonos. « Il sélectionne et fixe des scènes, des moments dans le temps et des épisodes. Ensuite, il aligne ses mécanismes, ses capteurs et d’autres composantes pour agir sur ce qu’il veut voir et choisit les points de vue à partir desquels il peut le mieux saisir ce qu’il veut. Notre cadre hyperdimensionnel peut répondre à chacun de ces objectifs. »
En dehors des robots, les scientifiques voient également une application de leurs théories dans l’apprentissage profond des méthodes d’IA employées dans l’exploration de données (data mining) et la reconnaissance visuelle.
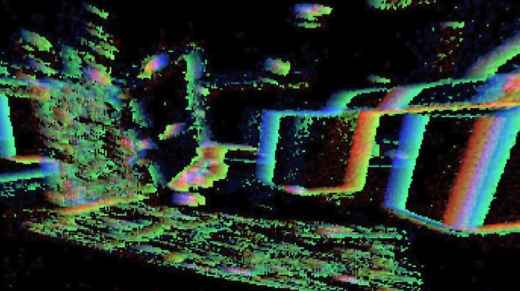
Pour tester la théorie, l’équipe a utilisé un capteur de vision dynamique (dynamic vision sensor, DVS) qui capture continuellement les bords des objets dans le cloud au fur et à mesure de leur passage. En se concentrant rapidement sur les contours de la scène et le mouvement, ce capteur est bien adapté à la navigation autonome des robots. Les données sont stockées dans des vecteurs binaires, ce qui permet aux scientifiques d’appliquer le calcul hyperdimensionnel.
Voici une vidéo du fonctionnement du DVS :
La recherche a été menée par les doctorants en informatique Anton Mitrokhin et Peter Sutor, Jr. et Cornelia Fermüller, chercheuse associée à l’Institute for Advanced Computer Studies de l’Université du Maryland, ainsi que par le professeur en informatique Yiannis Aloimonos. Il a conseillé Mitrokhin et Sutor.
Lire aussi : L’intelligence artificielle devient dangereusement bonne pour imiter les comportements humains
Source : Big Think – Traduit par Anguille sous roche














